INTRODUCCIÓN
El ser humano se desenvuelve en un entorno de continuo aprendizaje, desde el momento en que hace uso de su actividad sensorio-motriz, toda la información recolectada es almacenada en forma de memoria de corto y largo plazo. Así los datos son guardados en las redes preexistentes (memoria de corto plazo) o en forma de cambios estructurales y funcionales de las redes neuronales (memoria de largo plazo) en respuesta a los estímulos captados por distintos órganos receptores.(1) En el caso de una lesión de la médula espinal, se pierde la capacidad sensorial y motriz conservando toda la información almacenada durante la vida del individuo.
Como regla general, mientras más arriba esté localizada la lesión a la médula espinal, más extenso será el rango de alteraciones, que pueden incluir la pérdida del control sensorial o motor de las extremidades inferiores, el tronco y las extremidades superiores, así como la pérdida de regulación autonómica (involuntaria) del cuerpo. Si la lesión ocurre a nivel cervical, esta causará parálisis en los brazos, el cuerpo y las piernas, una condición llamada tetraplejía. Una alteración de la integridad de la médula a nivel torácico se manifiesta mediante pérdida sensorial y/o motora en el tronco y las piernas. Esta condición se denomina paraplejía.
La cuadriplejía (o tetraplejía) puede ser de origen traumático o no traumático. En el caso de la patología no traumática, generalmente existe una enfermedad subyacente: infecciones, tumores, enfermedades musculo-esqueléticas como la osteoartritis, o problemas congénitos.(2,3)
Según datos del Consejo Nacional para la Igualdad de Discapacidades,(4) en el Ecuador existen 214 225 personas con una discapacidad física, los cuales representan el 46,72 % del total de personas con discapacidad; de ellas, 40 068 presentan un grado de discapacidad comprendido entre el 75 % y el 100 %. La discapacidad física afecta principalmente a adultos en edad productiva, y en términos de género, presenta una distribución casi uniforme, con ligero predominio del género masculino (56,62 %).
La inactividad debida a la paraplejía o cuadriplejía puede causar problemas como: úlceras por presión, espasmos musculares, huesos debilitados, dolor crónico y ansiedad.(5) En la actualidad, en países desarrollados, gracias a la extensión de los métodos de tratamiento y rehabilitación, este tipo de lesiones son considerados más bien un desafío personal y social que puede ser superado con éxito.(2,3) La calidad de vida, en este caso, depende en gran medida de las condiciones del entorno (recursos y servicios adecuados, relaciones de apoyo, e inclusión comunitaria).(5)
Una de las formas de conservar la energía física de las personas y proveerlos de una mayor maniobrabilidad fue la invención de sillas eléctricas controladas mediante las señales cerebrales. El uso de este tipo de sillas de ruedas en personas con discapacidad ha generado una gran atención, debido a su flexibilidad, comodidad, costo relativamente bajo, alta movilidad y fácil configuración.(6)
Este trabajo tiene como objetivo describir el diseño de un sistema para controlar una silla de ruedas, mediante las señales eléctricas cerebrales de un paciente con paraplejía.
MÉTODOS
Se realizó un estudio de innovación tecnológica, en la Universidad Tecnológica Equinoccial del Ecuador. Contó con cuatro fases: 1) estudio de cada una de las librerías y bibliotecas que permiten enlazar el equipo Emotiv® Neuroheadset EEG hacia una PC, para luego ser controladas mediante el desarrollo de una interfaz; 2) elaboración de la aplicación bajo una plataforma de entorno y desarrollo para diseñar sistemas, controlando de forma inalámbrica un prototipo de silla de ruedas; 3) diseño y elaboración del prototipo de silla de ruedas y de la tarjeta de potencia, la cual controló dos motores de corriente continua; 4) evaluación del sistema mediante indicadores de eficiencia, eficacia, efectividad e índice de carga de trabajo que el usuario puede presentar al intentar mover el prototipo de silla de ruedas mediante las señales cerebrales.
La aplicación software para detectar las ondas cerebrales se desarrolló en la plataforma LabVIEW usando bibliotecas de vínculos dinámicos (edk.dll) de Emotiv y librerías de Arduino. Los dlls envían las señales de electroencefalograma (EEG) adquiridas por la EPOC Neuroheadset que corresponden con los patrones generados (actividad cerebral), hacia la aplicación en LabVIEW, y posteriormente a la tarjeta Arduino, que controla la tarjeta electrónica de potencia que genera el direccionamiento y movimiento de la silla de ruedas.
Las librerías utilizadas para adquirir las señales en LabVIEW fueron: Emotiv Create Task, Emotiv Start Task, Emotiv Stop Task y Emotiv Multi-task.
La aplicación en LabVIEW recibe información de la librería Emotiv Multi-Task (datos 0,1) y mediante comparaciones booleanas se define el movimiento que corresponda.
Un módulo HC05 permitió la comunicación entre Arduino y la computadora, mientras que un “dongle” USB de 2.4 GHz lo hizo entre la diadema y la computadora es mediante; lo que garantizó que la silla pudiera moverse sin obstrucción de cables.
Las señales EEG generadas por el usuario, como: emoción, participación/aburrimiento, frustración y meditación, fueron observadas y medidas usando un waveform. (Figura 1).

Los parámetros de configuración fueron: el puerto de comunicación, tipo de conexión, tipo de tarjeta Arduino, Baud Rate y el número de bytes por paquete; así como los indicadores led de dirección de movimiento de la silla de ruedas.
La tarjeta Arduino y un puente H (L293D) controlaron la tarjeta electrónica de potencia, la misma que proporcionó energía para los dos motores de las llantas de la silla de ruedas.
Para que los enlaces se generasen, las librerías de la diadema en LabVIEW debieron contener una ruta específica, y la tarjeta Arduino un firmware que permitiese la comunicación.
La tarjeta electrónica de potencia integró el módulo HC05, la bornera de alimentación, el integrado L293D, la salida de corriente hacia los motores y la incorporación con la tarjeta Arduino. (Figura 2).
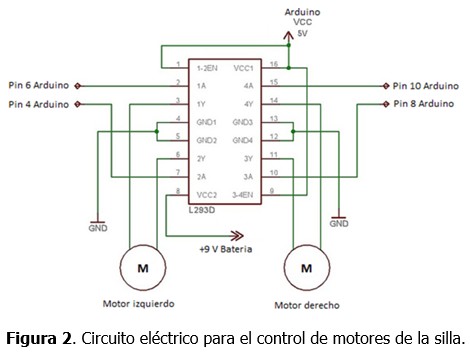
Este circuito dirigió el movimiento de dos motores en ambos sentidos, ya fuera avance o retroceso.[a] (Figura 3).
Los motores de la silla de ruedas se alimentaron de una batería de 9V DC, y se controlaron con el integrado L293D.
Los pines digitales (4, 6, 8, 10) de la tarjeta Arduino se utilizaron para enviar señales al L293D, dependiendo de la estimulación facial censada, que definió el avance, retroceso o giro de la silla de ruedas.
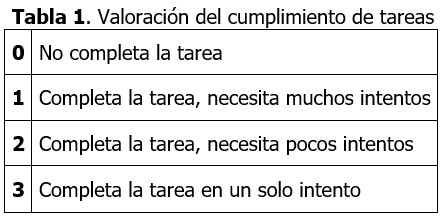
Para calcular la efectividad del sistema se desarrolló una escala de valoración (Tabla 1) que dependió del número de intentos necesarios para ejecutar las cinco tareas. Después se ponderó y evaluó el índice de carga de trabajo, como propone Human Performance Group de la Nasa Ames Research Center (NASA-TLX).(7)
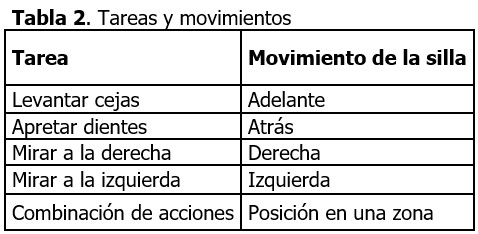
Las cinco tareas a realizar por el usuario utilizando la diadema, correspondieron a igual número de acciones a ejecutar por la silla. (Tabla 2).
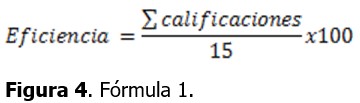
La eficiencia del 100 % del sistema se alcanza mediante un puntaje de 3 en todas las calificaciones. Este indicador fue evaluado con la fórmula 1[1]. (Figura 4).
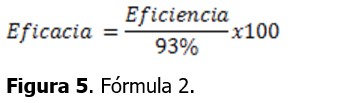
Para calcular la eficacia se estableció como meta una eficiencia del 93 % del sistema, considerando los posibles errores o retardos de tiempo durante el proceso de evaluación, y se utilizó la siguiente fórmula [2]. (Figura 5).
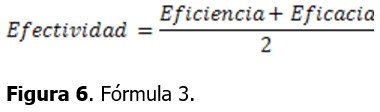
Por último, fue calculada la efectividad utilizando la fórmula 3 [3]. (Figura 6).
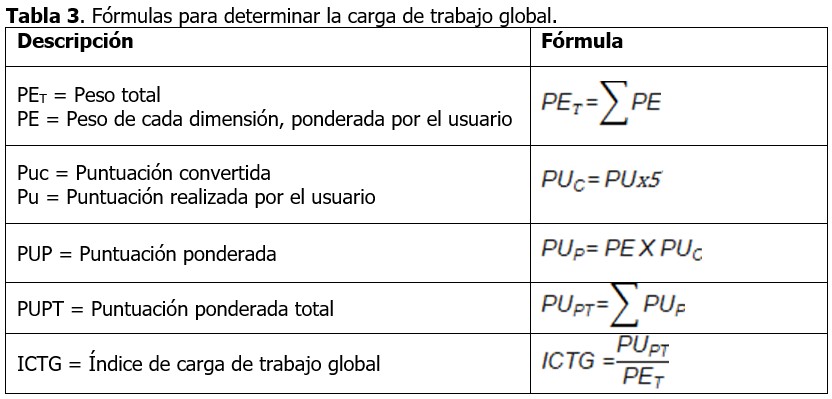
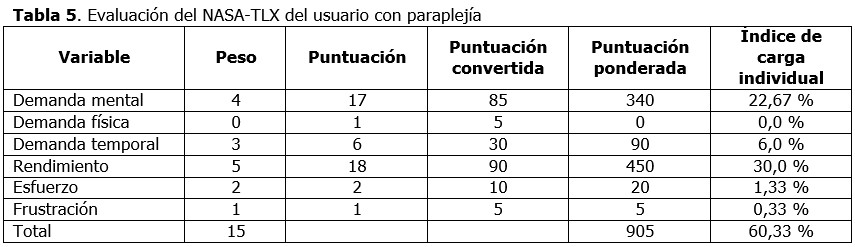
Para calcular el índice de carga de trabajo global se utilizó el NASA-TLX, una vez terminado las cinco tareas propuestas. El método constó de una fase de puntuación dónde el usuario calificó la tarea realizada en una escala de 1 a 20, mostrando su nivel de confort o disconfort. La segunda fase fue de ponderación: el usuario ponderó la actividad realizada, comparando las cargas impuestas por cada una de las seis subescalas (demanda mental, demanda física, demanda temporal, rendimiento, esfuerzo y frustración).
Para calcular los datos, se partió de las elecciones hechas por el usuario en la fase de ponderación. De tal forma, se obtuvo el peso (PE) de cada dimensión. Dependiendo del número de veces que se eligió, este peso varió entre 0 y 5. (Tabla 3).
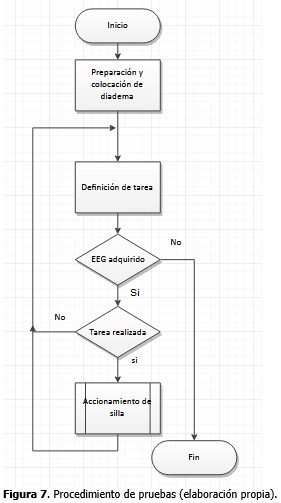
La prueba del sistema se realizó con un usuario de 40 años de edad, con paraplejía espástica causada por fractura en la columna vertebral (vértebras torácicas T5 y T6), para lo cual se siguió un procedimiento (Figura 7) que inició con la preparación y colocación de la diadema, para luego definir la tarea, realizar las mediciones EEG y el accionamiento de la silla.
La diadema EEG (EPOC neuroheadset) es un sistema portable de alta resolución, multicanal y multiplataforma diseñada para investigaciones prácticas que proporciona una interfaz cerebro-computadora.[b]
Cuenta con 14 canales electro-encefalográficos, dos referencias situadas detrás de las orejas y una batería de litio (640mAh) que proporciona seis horas de uso continuo, utilizando Bluetooth Low Energy (BLE).
La nomenclatura y ubicación de los canales se basó en el sistema 10-20(8) determinado por la Federación Internacional de Sociedades de Electroencefalografía: AF3, F7, F3, FC5, T7, P7, O1, O2, P8, T8, FC6, F4, F8, AF4 con referencias CMS/DRL en P3 y P4, respectivamente.
La colocación correcta de las dos referencias, CMS y DRL, fue esencial;(7) ya que estos canales entregan el potencial cero que permite el registro unipolar de las señales EEG, se distinguen por tener una cobertura plástica y no una almohadilla. Los electrodos se encuentran adheridos a un soporte plástico. Para el correcto funcionamiento y una conducción eléctrica adecuada, cada almohadilla fue humedecida con una solución salina. Para asegurar una buena comunicación entre la diadema y la computadora, se requirió del correcto proceso de instalación. Fueron hidratadas las almohadillas de los sensores añadiendo abundante solución salina para mejorar la conducción eléctrica. Luego se verificó la conexión de cada uno de los electrodos utilizando el software de la diadema.
Para tener una perspectiva más amplia del uso del sistema, se elaboraron gráficos comparativos de las señales EEG de un usuario sano (color azul) y las del usuario con paraplejía (color rojo). El usuario sano no padecía de paraplejía, era del mismo sexo y edad similar.
Los resultados se presentaron en forma de tablas y gráficos.
[a]Para que el motor avance en un sentido, uno de los pines debe estar en alto y el otro en bajo. Si las dos señales se encuentran en alto o bajo al mismo tiempo, el motor no genera movimiento.
[b]Una interfaz cerebro-computadora (BCI) es un sistema de comunicación constituido por componentes hardware y software, mediante el cual las intenciones del usuario son registradas, interpretadas y ejecutadas por un ordenador en tiempo real. Dicho sistema crea un canal que permite a los usuarios interactuar con su entorno mediante su actividad cerebral. Existen tres tipos de BCI: el invasivo, el no invasivo y el parcialmente invasivo.
RESULTADOS
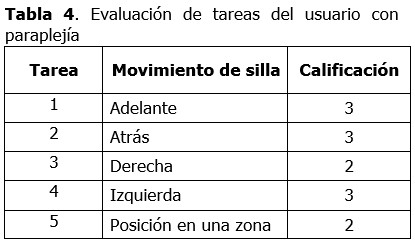
El usuario con discapacidad severa obtuvo una calificación alta en las cuatro primeras tareas, o sea, necesitó de un solo intento para mover la silla de ruedas. En la quinta tarea obtuvo 2, puesto que necesitó de varios intentos para movilizar la silla hacia una zona establecida (Tabla 4). El índice de eficiencia fue del 86,67 %, con una eficacia del 93,19 %, y una efectividad del 89,93 %.
El índice de carga de trabajo obtenido fue de un 60,33 %, con índices de cargas individuales relevantes: demanda metal con 22,67 % y rendimiento con un 30 %. (Tabla 5).
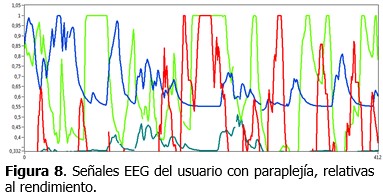
En cuanto al rendimiento, el usuario presentó un elevado interés de éxito al ser evaluado por el sistema. (Figura 8).
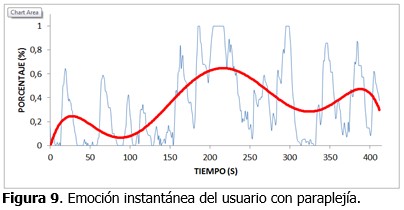
Según las señales de emoción instantánea, representadas con una línea de tendencia polinómica de sexto orden, al inicio del experimento el usuario presentó un bajo nivel de emoción, que paulatinamente se incrementó, con un porcentaje del 30 %. (Figura 9).
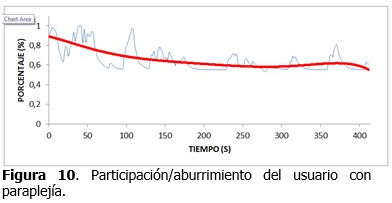
Las señales de participación/aburrimiento, representadas con una línea de tendencia polinómica de sexto orden, refirieron que el paciente inició con un 90 % y decayó hasta un 50 % al final del experimento. (Figura 10).
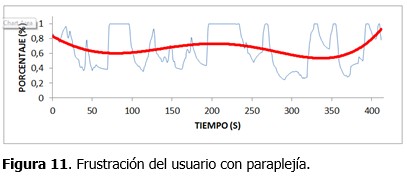
Se observaron señales de frustración, que prácticamente se mantuvieron durante todo el experimento, con una tendencia al incremento en la fase final. (Figura 11).
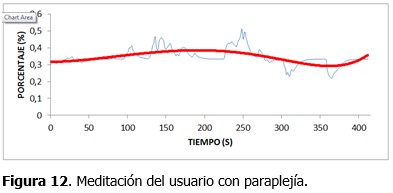
Las señales de meditación observadas indicaron que se mantuvo alrededor del 32 % durante todo el experimento. (Figura 12).
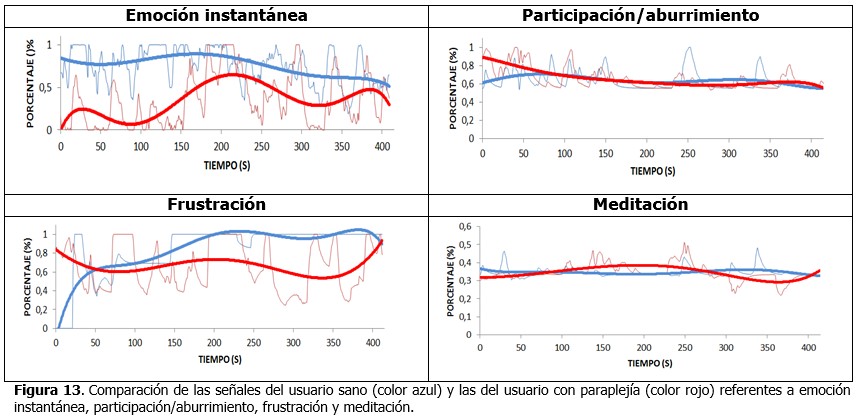
La comparación de las señales del usuario sano (color azul) y las del usuario con paraplejía (color rojo) (Figura 13), referentes a emoción instantánea, participación/aburrimiento, frustración y meditación, indicó lo siguiente:
Emoción instantánea: al inició de la evaluación del sistema el usuario sano presentó mayor alegría (83 %), mientras que el otro era más escéptico y a medida que transcurrió el proceso los dos tendieron a presentar los mismos niveles de emoción en general; se evidenció, además, una fuerte tendencia hacia abajo por parte del usuario sano, mientras que el usuario con paraplejía presentó emociones más variadas, con altas y bajas en emociones.
Participación/aburrimiento: al inicio del experimento, los dos presentaron una participación/aburrimiento alto, que durante el proceso tendió a estabilizarse alrededor del 60 %, siempre con mayor variación el usuario con paraplejía.
Frustración: el paciente con paraplejía comenzó la evaluación con una frustración alta, debido, en parte, a que utilizaba el sistema por primera vez, pero a medida que avanzaron las pruebas, el grado de frustración se incrementó para ambos, a pesar de que iniciaron con apreciaciones antagónicas, y que, en términos cuantitativos, el usuario sano sufrió un mayor grado de frustración.
Meditación: ambos presentaron grados de meditación entre el 30 y 40 % durante todo el proceso de evaluación. Esto demostró que estuvieron concentrados en niveles similares, para mover la silla de ruedas, durante todo el experimento, con una tendencia al incremento por el usuario enfermo.
DISCUSIÓN
En este artículo las ondas cerebrales fueron registradas mediante EEG; representación gráfica de la diferencia de voltaje entre dos sitios en el cerebro en función del tiempo.(9,10)
En el proceso de captación de ondas cerebrales, los electrodos (superficie metálica lubricada por una solución salina o gel electrolítico) son los encargados de transformar las diferencias de potenciales del cerebro en corriente eléctrica.
Las señales EEG recibidas a través de la diadema durante las pruebas, demostraron que el usuario presentó un elevado interés de éxito al ser evaluado por el sistema.
Este estudio introduce nuevos elementos, que lo distinguen de publicaciones anteriores. Guin(11) presentó un prototipo de silla de ruedas controlada mediante electrodos, sin embargo, el trabajo se centra en analizar la calidad de las señales captadas por estos electrodos. Una publicación posterior,(12) informa del uso del Neurosky Mindwave Headset para controlar una silla de ruedas con un GUI desarrollado en Java. También se ha utilizado un EEG sistema para controlar una silla de ruedas utilizando el eye blink para moverla en cuatro direcciones.(13) En esta investigación, para detectar las ondas cerebrales de atención y parpadeo del ojo, se ha empleado un Neurosky Headset, que se comunica vía bluetooth con una aplicación en Android; mientras que el sistema de control está desarrollado en un microcontrolador Arduino que se encarga del movimiento de la silla.
Además de controlar un prototipo de silla de ruedas mediante las señales generadas por el cerebro, se analizan otros parámetros relacionados con el uso del sistema, como emociones, aburrimiento, frustración y meditación; así como se comparan dos usuarios: uno sin discapacidad y otro con paraplejía.
Es posible el control y manejo efectivo de una silla de ruedas utilizando una interfaz cerebro-computadora que interpreta las señales cerebrales al momento de realizar diferentes gestos faciales. El protocolo elaborado para la evaluación garantizó la realización adecuada de cada una de las tareas por el usuario. Se puede obtener una efectividad mayor con un entrenamiento previo, lo que permitiría la adaptación a los distintos movimientos de la silla de ruedas. Los datos obtenidos muestran que el sistema respondió apropiadamente a las acciones requeridas para la movilidad de la silla de ruedas. De acuerdo a las evaluaciones realizadas, este puede ser manejado tanto por personas sanas como por aquellas con paraplejía o con discapacidad severa.
Conflicto de interés: Los autores declaran no tener conflicto de intereses.
Contribución de autoría: Identificación, definición y justificación del problema: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov; desarrollo de los diseños conceptual, mecánico, electrónico: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov; muestreo y análisis estadístico: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov; revisión de la literatura: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov; escritura del artículo: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov; revisión crítica: Fausto Freire Carrera, Olga Chadrina, Edison Maila Andrango y Vladimir Drozdov.
Financiación: Universidad Tecnológica Equinoccial.
